3D建模学习工作室
首页
关于
在线工具
3D建模插件
3D模型自动纹理开发包
在线材质纹理工具
合成数据生成器
3D软件
3D建模
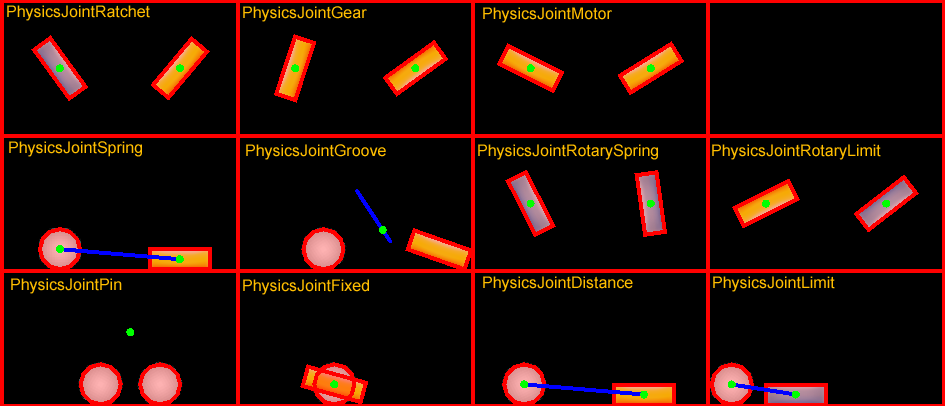
Cocos2d-x:物力引擎-碰撞
ygtu
Jun 19, 2023
•
6 min read