低成本高效搞定点云模型重建
经济高效地解决点云模型重建的问题需要综合考虑数据采集、预处理、数据配准、特征提取、三维模型重建以及模型优化与后处理等多个环节。
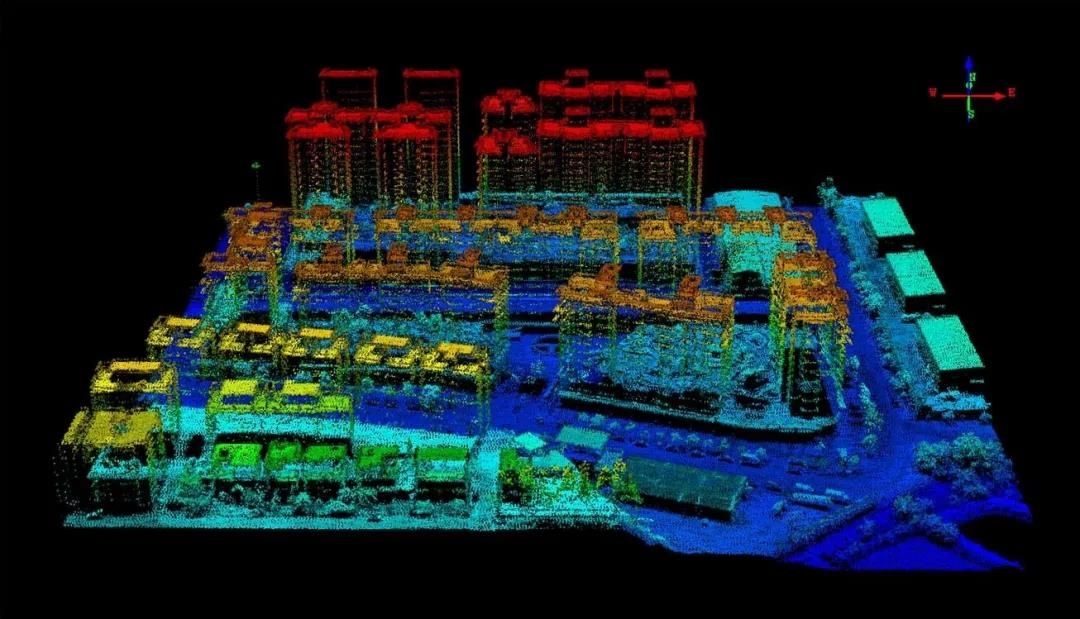
随着三维技术的发展,点云模型重建在多个领域如计算机图形学、机器人导航、建筑设计及文物保护等方面得到了广泛应用。然而,高精度的点云模型重建通常需要昂贵的设备和复杂的计算资源,这限制了其普及和应用范围。本文旨在探讨如何在经济高效的条件下解决点云模型重建的问题。
推荐使用NSDT 3DConvert进行模型格式转换,支持将las、laz、ply、xyz、pts等点云格式转换为obj、stl等格式。
数据采集与预处理
数据采集
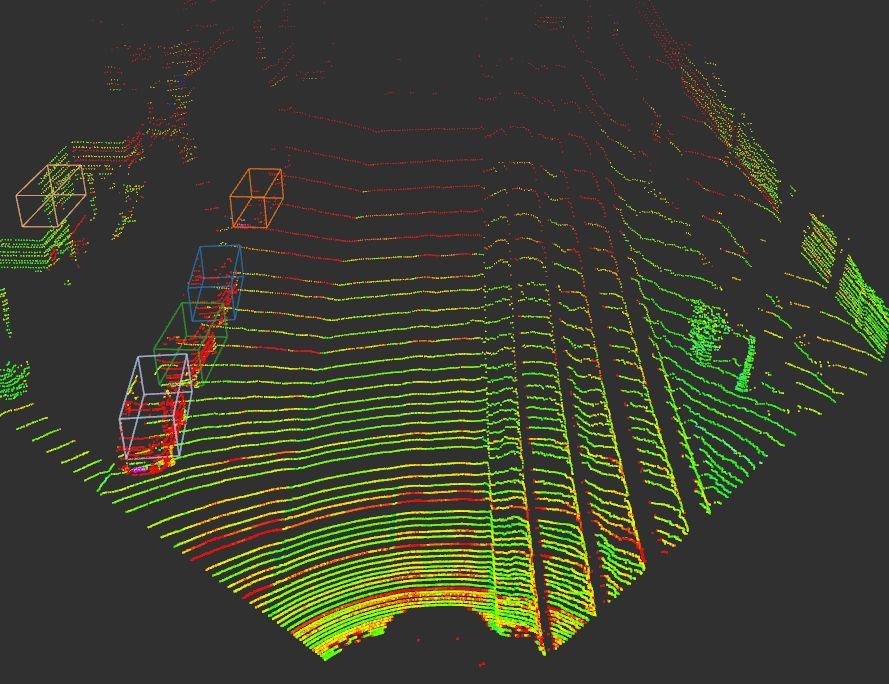
点云数据采集是模型重建的第一步,选择合适的采集设备至关重要。激光雷达(LiDAR)、高清摄像头和无人机是常用的数据采集设备。在预算有限的情况下,可以考虑使用成本较低的无人机搭载高清摄像头进行数据采集。通过规划合理的飞行路线和拍摄策略,可以获取到高质量的点云数据。
数据预处理
采集到的点云数据往往包含噪声和无效数据,需要进行预处理以提高数据质量。数据清洗、去噪和滤波是预处理的重要步骤。通过开源的或低成本的软件工具,如PCL(Point Cloud Library)或CloudCompare,可以有效地进行这些操作。此外,利用自动化脚本处理批量数据可以进一步提高效率,减少人工干预。
数据配准与特征提取
数据配准
如果点云数据来自多个传感器或扫描设备,需要进行数据配准以将不同数据源的点云对齐到同一个坐标系中。ICP(Iterative Closest Point)算法是一种高效可靠的数据配准方法,可以在不增加过多计算成本的情况下实现高精度的配准。通过优化ICP算法的参数和迭代次数,可以在保证精度的同时提高处理速度。
特征提取
在点云数据中提取有意义的特征是进行进一步分析和建模的关键。提取点的法线、曲率、颜色等属性,以及检测表面特征和边缘,有助于后续的三维重建。通过利用轻量级的特征提取算法和工具,可以在不牺牲太多精度的前提下降低计算成本。
三维模型重建
基于体素的重建方法
基于体素的重建方法将点云数据划分为多个小立方体(体素),并根据每个体素内的点云信息判断其是否属于表面。Marching Cubes算法是常用的基于体素的重建方法,它可以在较低的计算成本下实现较好的重建效果。通过优化算法参数和减少不必要的计算,可以进一步提高重建效率。
基于表面重建的方法
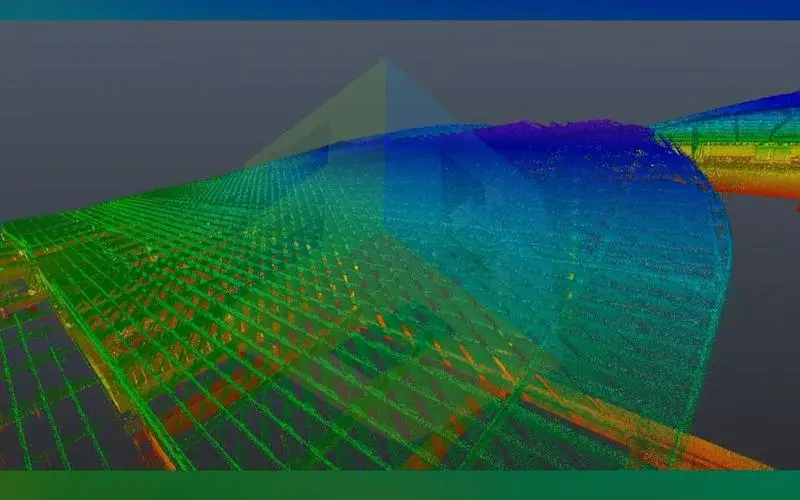
基于表面重建的方法通过拟合表面来重建三维模型。在点云数据较为稠密的情况下,Delaunay三角剖分和Poisson重建算法等表面拟合方法能够取得较好的效果。然而,这些方法在点云数据稀疏时容易出现重建不完整或失真的问题。因此,在选择重建方法时需要根据实际情况进行评估和选择。
基于深度学习的方法
随着深度学习技术的发展,基于神经网络的方法在点云重建中也得到了广泛应用。PointNet和PointNet++等网络结构能够有效地处理点云数据并实现高精度的重建。然而,这些方法通常需要大规模的数据集和较长的训练时间,对计算资源要求较高。在经济高效的解决方案中,可以考虑使用预训练的模型或迁移学习的方法,以减少训练成本和时间。
模型优化与后处理
生成的三维模型可能需要进行优化和后处理以满足特定的需求和应用场景。这包括调整模型的细节、纹理、光照等属性,以及修复模型的缺陷或不完整部分。通过利用开源的或低成本的模型编辑软件,如Blender或MeshLab,可以方便地进行这些操作。此外,通过引入自动化脚本和批量处理工具,可以进一步提高优化和后处理的效率。
结论
经济高效地解决点云模型重建的问题需要综合考虑数据采集、预处理、数据配准、特征提取、三维模型重建以及模型优化与后处理等多个环节。通过选择合适的设备和软件工具,优化算法参数和计算流程,可以在不牺牲太多精度的前提下降低重建成本和时间。随着技术的不断进步和成本的逐渐降低,点云模型重建将在更多领域得到广泛应用和推广。