推荐:将 NSDT场景编辑器 加入你的3D开发工具链。
介绍
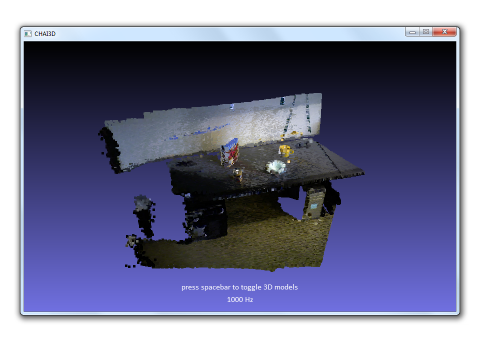
点云是三维坐标系中的一组数据点。在 CHAI3D 中,这些点由 X、Y 和 Z 坐标定义,通常用于表示对象的外表面。
点云可以由3D扫描仪创建。这些设备测量物体表面上的大量点,并通常将点云输出为数据文件。点云表示设备已测量的点集。
点云对象
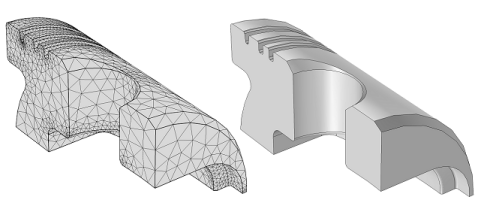
与网格对象类似,点云模型使用顶点来描述组成云的所有点。手指代理算法还用于计算触觉工具和对象之间的所有相互作用力。还必须在创建所有点后初始化碰撞检测。
using namespace chai3d;
// create a virtual mesh
cloud = new cMultiPoint();
// add object to world
world->addChild(cloud);
// load point cloud
cloud->loadFromFile("myPointCloud.obj");
// create